- 放大
- 缩小
- 默认
中国民航机坪特种设备智能停止系统研究与设计
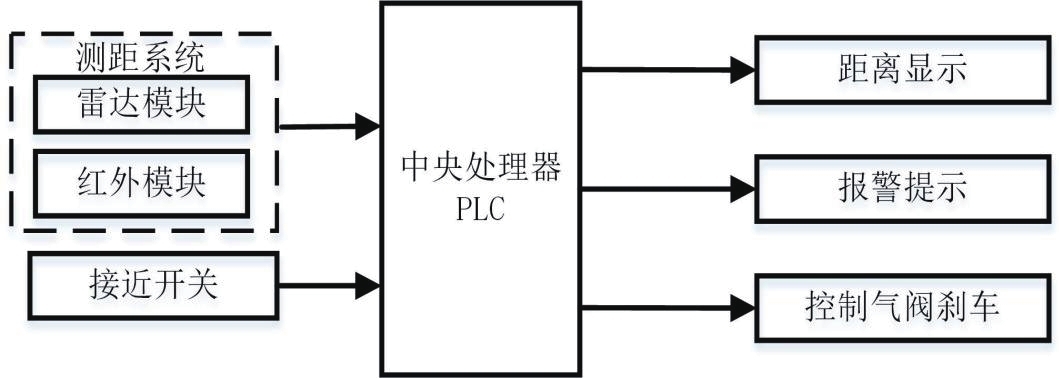
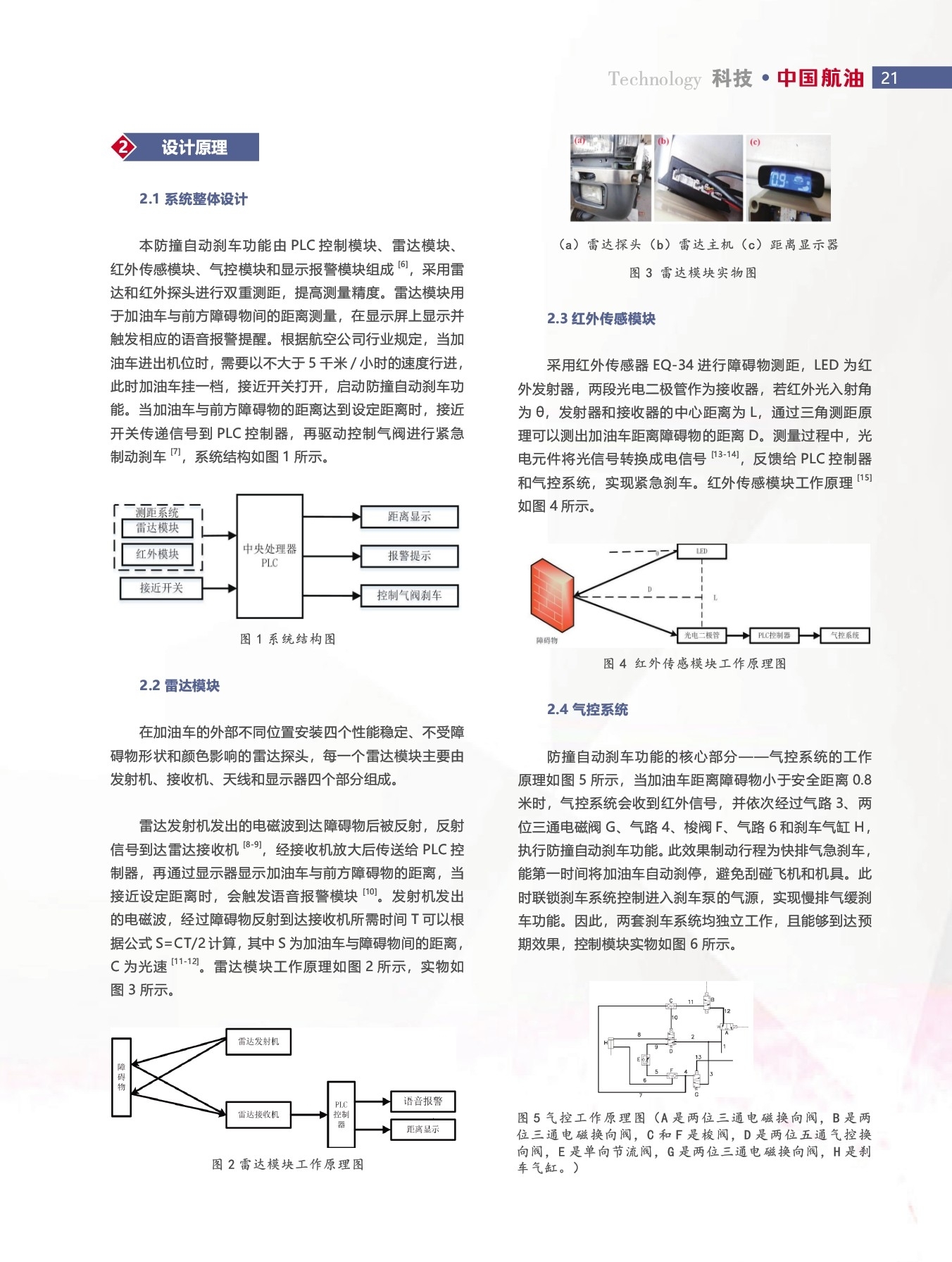
图1 系统结构图
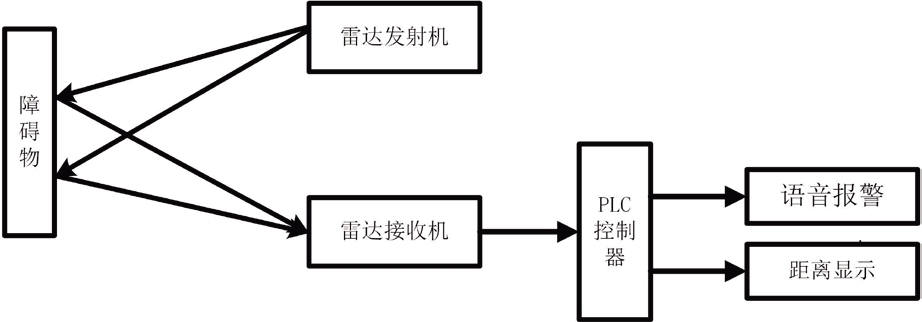
图2 雷达模块工作原理图
(a)雷达探头(b)雷达主机(c)距离显示器
图3 雷达模块实物图
图4 红外传感模块工作原理图
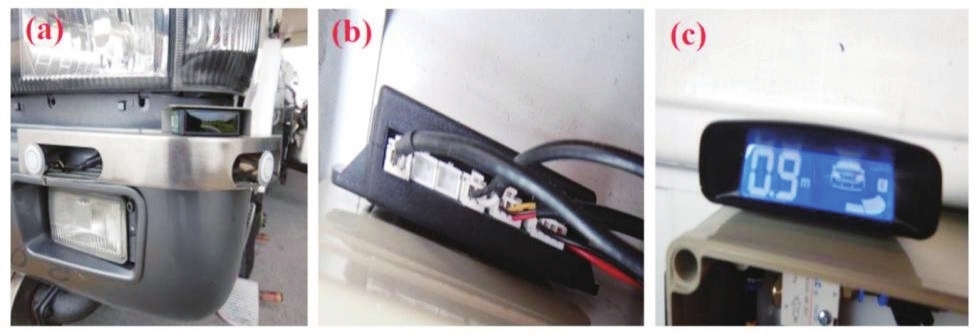
图5 气控工作原理图(A是两位三通电磁换向阀,B是两位三通电磁换向阀,C和F是梭阀,D是两位五通气控换向阀,E是单向节流阀,G是两位三通电磁换向阀,H是刹车气缸。)
2 设计原理
2.1 系统整体设计
本防撞自动刹车功能由PLC控制模块、雷达模块、红外传感模块、气控模块和显示报警模块组成[6],采用雷达和红外探头进行双重测距,提高测量精度。雷达模块用于加油车与前方障碍物间的距离测量,在显示屏上显示并触发相应的语音报警提醒。根据航空公司行业规定,当加油车进出机位时,需要以不大于5千米/小时的速度行进,此时加油车挂一档,接近开关打开,启动防撞自动刹车功能。当加油车与前方障碍物的距离达到设定距离时,接近开关传递信号到PLC控制器,再驱动控制气阀进行紧急制动刹车[7],系统结构如图1所示。
2.2 雷达模块
在加油车的外部不同位置安装四个性能稳定、不受障碍物形状和颜色影响的雷达探头,每一个雷达模块主要由发射机、接收机、天线和显示器四个部分组成。
雷达发射机发出的电磁波到达障碍物后被反射,反射信号到达雷达接收机[8-9],经接收机放大后传送给PLC控制器,再通过显示器显示加油车与前方障碍物的距离,当接近设定距离时,会触发语音报警模块[10]。发射机发出的电磁波,经过障碍物反射到达接收机所需时间T可以根据公式S=CT/2计算,其中S为加油车与障碍物间的距离,C为光速[11-12]。雷达模块工作原理如图2所示,实物如图3所示。
2.3 红外传感模块
采用红外传感器EQ-34进行障碍物测距,LED为红外发射器,两段光电二极管作为接收器,若红外光入射角为θ,发射器和接收器的中心距离为L,通过三角测距原理可以测出加油车距离障碍物的距离D。测量过程中,光电元件将光信号转换成电信号[13-14],反馈给PLC控制器和气控系统,实现紧急刹车。红外传感模块工作原理[15]如图4所示。
2.4 气控系统
防撞自动刹车功能的核心部分——气控系统的工作原理如图5所示,当加油车距离障碍物小于安全距离0.8米时,气控系统会收到红外信号,并依次经过气路3、两位三通电磁阀G、气路4、梭阀F、气路6和刹车气缸H,执行防撞自动刹车功能。此效果制动行程为快排气急刹车,能第一时间将加油车自动刹停,避免刮碰飞机和机具。此时联锁刹车系统控制进入刹车泵的气源,实现慢排气缓刹车功能。因此,两套刹车系统均独立工作,且能够到达预期效果,控制模块实物如图6所示。