- 放大
- 缩小
- 默认
中国民航机坪特种设备智能停止系统研究与设计
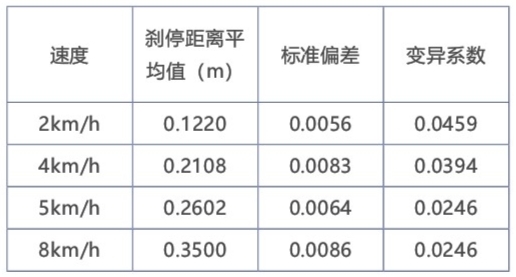
表2 计算结果
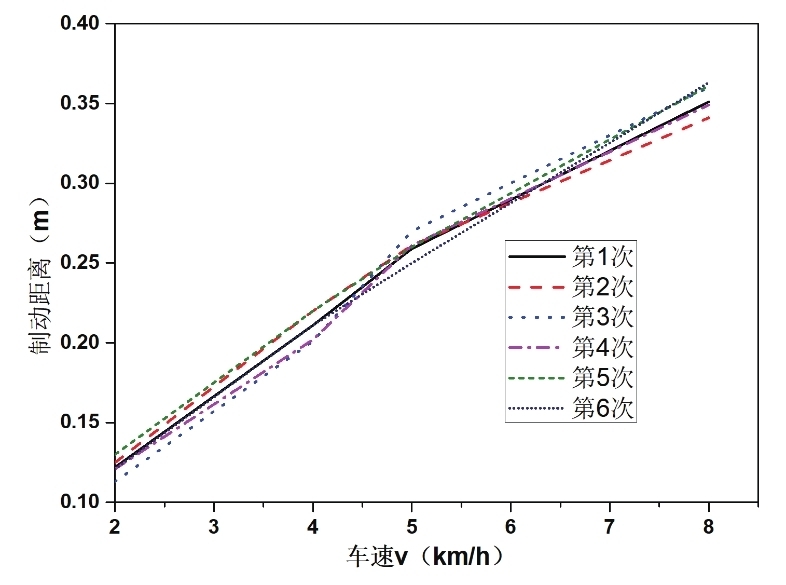
图8 加油车车速与制动距离关系图
由上表1计算出的刹停距离平均值、标准偏差和变异系数如表2所示。
进行测试,结果如表1所示。由表1和表2可知,时速为2千米/小时、4千米/小时、5千米/小时和8千米/小时这几组数据的标准差偏差都在0.005-0.009范围内,变异系数都在0.02-0.05之间,说明偏差极小。由表1数据得到的制动距离与加油车车速间的关系如图8所示。
由图8可知,多次测试车速与制动距离的变化情况大体一致,表明该防撞自动刹车功能很稳定、误差极小。
5 结论
本文对中国民航机坪特种设备的智能停止系统进行研究,设计了一种基于PLC控制器的民航特种设备之一的管线加油车防撞自动刹车功能,不但符合行业标准,而且与原车控制系统兼容性好。该功能采用雷达模块和红外光电模块进行双重测距,增加了测量精度。
这种防撞自动刹车功能在机场飞机加油车上首次应用,安装简单,费用低,且不受地域限制,不仅能适用于管线加油车,还能用于民航领域其他特种车辆的防撞。
参考文献:
[1]杨闯.基于信息融合的汽车自主防撞控制系统设计与研究[D].2017.
[2]崔宾.基于毫米波雷达的汽车防撞系统研究[D].西南交通大学,2011.
[3]冯力方.汽车防撞雷达信号处理研究及系统设计[D].电子科技大学,2016.
[4]杨维娜.基于单片机的汽车自动刹车系统设计[J].企业导报,2015,301(21):54+59.
[5]刘明华.基于FPGA的自动刹车系统的研究与设计[J].科技传播,2014,000(006):81-82,65.
[6]奠石镁.超声波测距在汽车倒车防撞系统中的应用[J].电脑知识与技术(学术交流),2007(04):1083-1085.
[7]帅盼,张海宁,白福,等.基于超声波测距的汽车倒车避障系统设计[J].国外电子测量技术,2016(10):54-57.
[8]王建宇.基于物联网的汽车智能测距系统的设计与实现[J].现代电子技术,2015,38;No.453(22):94-98.
[9]张乐,秦石乔,王省书,张宝东,任建国.用于智能汽车的小型LD激光测距仪[J].激光技术,2005,29(2):130-131,168.
[10]王虎,杨启正,李约朋.基于超声波测距的汽车倒车防撞报警系统设计[J].时代汽车,2019(21):44-45.
[11]吴迅.基于单片机的汽车自动刹车系统设计[J].电子测试,2009(10):53-56.
[12]谢兴盛,方勇文,吴云峰,叶玉堂,陈昌彬,李长成,王兵学.汽车自适应驰控装置中的红外激光测距[J].激光技术,2004,28(5):521-523,530.
[13]王丽博,王庆平.基于红外测距传感器的倒车雷达电路板设计[J].农机使用与维修,2019(10):20-21.
[14]蒋晓玲,孟志强,陈燕东,等.汽车追尾防撞红外测距系统[J].光电子技术,2011,31(1).
[15]张召亮,张帆,马智远,张承学.激光测距在汽车智能防撞系统中的应用[J].中国水运(学术版),2007(07):55-56.
(作者单位:航油南宁分公司)