
- 放大
- 缩小
- 默认
基于YOLOv5模型的油料泄漏检测技术在油库安全管理中的应用

通过图中管道连接处目标检测方法、滴漏判断运动对比和目标检测算法、喷射判断分类方法,组合多种方法最终实现对管道连接处油料泄漏的检测和判断。
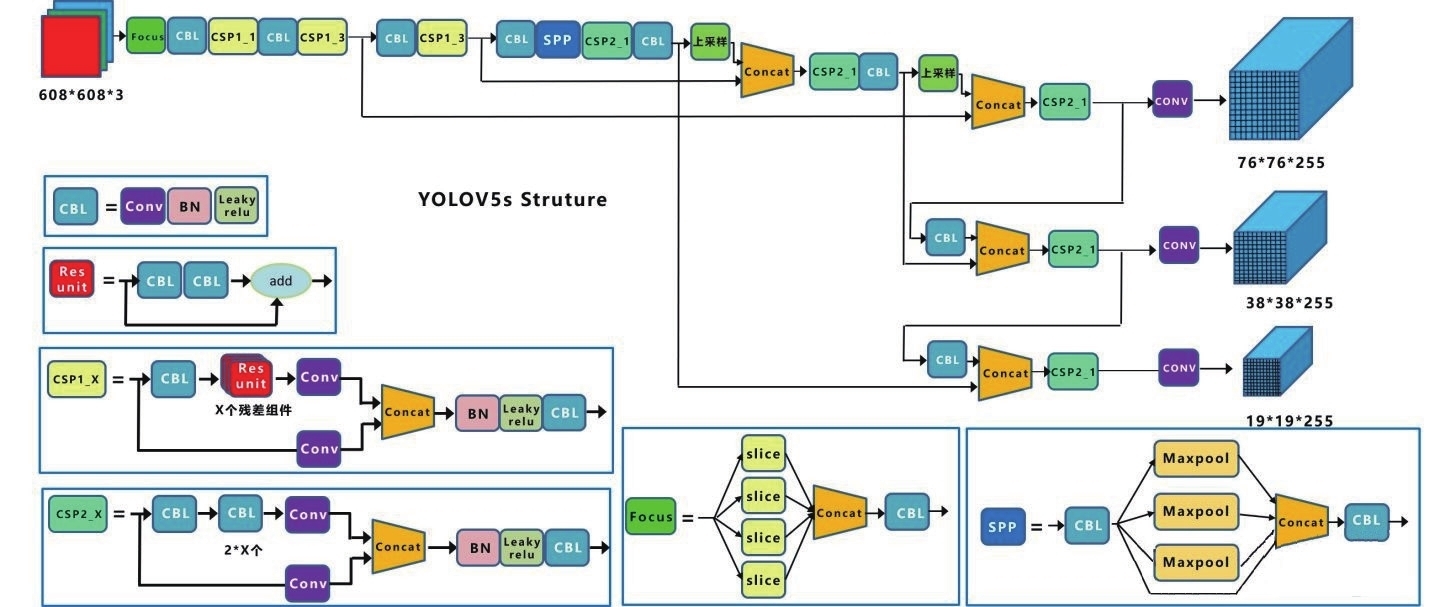
本文采用的检测算法为YOLOv5,YOLOv5是一种基于卷积神经网络(CNN)的端到端目标对象检测算法。[4]它将目标检测问题转变为回归问题,显著提高了物体检测速度。从YOLOv3开始YOLO系列算法具有了很大的改进[5],YOLOv3算法在以往的结构上做出改进,增加了多尺度检测,以及更深的网络结构darknet53[6]。YoLOv3成功应用在安全检测、火灾隐患分析等诸多安全管理领域[7]。在此之后,更进一步的Yolov4算法被提出[8],Yolov4的结构图和Yolov3相比,因为多了CSP结构,PAN结构,对算法进行较大改进[9]。YOLOv5的目标检测方法进行具体来说,输入图像被划分为S×S的网格:如果物体的真实中心在其边界内,该网格负责检测对象。然后,对象由每个网格上的一个界框预测,边界框和类别概率的最终坐标通过回归算法生成。对于Anchor Boxes聚类,为了准确检测图像中的不同尺度目标,在采集的数据集中采用了k-means聚类算法,以便提前获得更合适的锚框盒大小[10]。YOLOv5算法结构如图所示:
2.1.1 0NN网络特征提取
YOLOv5 Backbone上采用了CSPDarknet53、Mish激活函数、Dropblock等方式,是Darknet-19和Res-net模块组合起来的。骨干网络使用了Focus结构,比如4*4*3的图像切片后变成2*2*12的特征图。以Yolov5s的结构为例,原始608*608*3的图像输入Focus结构,采用切片操作,先变成304*304*12的特征图,再经过一次32个卷积核的卷积操作,最终变成304*304*32的特征图。归一化后的数据传入神经网络进行特征提取,获得三个不同大小的特征图(19*19,38*38,76*76),为了更好地学习到图像中的特征信息,19*19的特征图通过上采用,与38*38特征图进行融合,用相同的方法,将38*38特征图通过上采样与76*76特征图融合。通过这种方法,识别的准确率得到提升。
网络中采用了PAN结构,深层的特征图携带有更强的语义特征,较弱的定位信息。而浅层的特征图携带有较强的位置信息,和较弱的语义特征。FPN就是把深层的语义特征传到浅层,从而增强多个尺度上的语义表达。而PAN则相反把浅层的定位信息传导到深层,增强多个尺度上的定位能力。